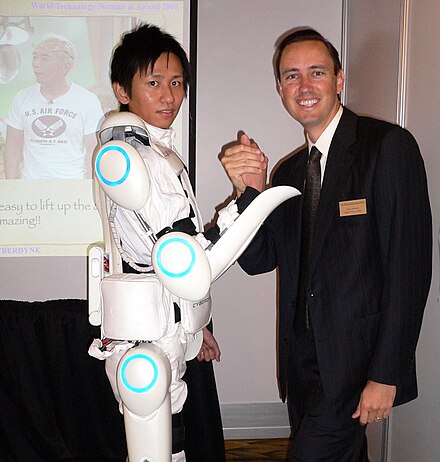
 Мужчина в прототипе костюма HAL 2005 года (слева) | |
| Производитель | Cyberdyne |
|---|---|
| Страна | Япония |
| Год создания | 1997 г. (самый ранний прототип) 2012 г. (полный костюм HAL-5) |
| Тип | Активный экзоскелет |
| Цель | Медицина / поисково-спасательные операции |
| Веб-сайт | cyberdyne.jp |
{kind=link}
Hybrid Assistive Limb (также известный как HAL ) является питание экзоскелет костюм , разработанный в Японии Цукуба университета и робототехники компании Cyberdyne . Он разработан для поддержки и расширения физических возможностей своих пользователей, особенно людей с ограниченными физическими возможностями. Существует две основных версии системы: HAL 3, который обеспечивает только функцию ног, и HAL 5, который представляет собой экзоскелет всего тела для рук, ног и туловища.
В 2011 году Cyberdyne и Университет Цукуба совместно объявили, что клинические испытания полного костюма HAL начнутся в 2012 году, а испытания продлятся до 2014 или 2015 года. [1] К октябрю 2012 года костюмы HAL использовались в 130 различных медицинских учреждениях по всей Японии. . [2] В феврале 2013 года система HAL стала первым экзоскелетом с электроприводом, получившим глобальный сертификат безопасности. [3] В августе 2013 года HAL получил сертификат EC для клинического использования в Европе как первый в мире нехирургический лечебный робот. [4] [5] Помимо медицинских применений, экзоскелет HAL использовался в строительстве и при ликвидации последствий стихийных бедствий. [6] [7]
История [ править ]
Первый прототип HAL был предложен профессором Университета Цукуба Ёсиюки Санкаи . Увлеченный роботами с третьего класса, Санкай стремился создать роботизированный костюм, чтобы «поддерживать людей». [8] В 1989 году, после получения докторской степени. в области робототехники он начал разработку HAL. Санкай потратил три года, с 1990 по 1993 год, на карту нейронов, которые управляют движением ног. Ему и его команде потребовалось еще четыре года, чтобы создать прототип оборудования. [9]
Третий прототип HAL, разработанный в начале 2000-х, был подключен к компьютеру. Одна его батарея весила почти 22 килограмма (49 фунтов), и для ее установки требовалось два помощника, что делало ее очень непрактичной. Напротив, более поздняя модель HAL-5 весит всего 10 килограммов (22 фунта), а ее аккумулятор и управляющий компьютер привязаны к талии владельца.
Cyberdyne начала сдавать в аренду костюмы HAL для медицинских целей в 2008 году. К октябрю 2012 года более 300 костюмов HAL использовались в 130 медицинских учреждениях и домах престарелых по всей Японии. Костюм доступен для институциональной аренды только в Японии за ежемесячную плату в размере 2000 долларов США. [2] В декабре 2012 года компания Cyberdyne была сертифицирована лабораторией Underwriters Laboratories по ISO 13485 - международному стандарту качества для проектирования и производства медицинских устройств . [10] В конце февраля 2013 года костюм HAL получил глобальный сертификат безопасности, став первым экзоскелетом с электроприводом, который сделал это. [3]В августе 2013 года костюм получил сертификат ЕС, разрешающий его использование в медицинских целях в Европе в качестве первого медицинского робота такого рода. [4] [5]
Дизайн и механика [ править ]
Когда человек пытается переместить их тело, нервные сигналы передаются от мозга к мышцам через двигательные нейроны, перемещая опорно - двигательный аппарат . Когда это происходит, на поверхности кожи можно обнаружить небольшие биосигналы . Костюм HAL регистрирует эти сигналы через датчик, прикрепленный к коже пользователя. На основе полученных сигналов силовой агрегат перемещает сустав, чтобы поддерживать и усиливать движения пользователя. Костюм HAL обладает кибернетической системой управления, состоящей из активируемой пользователем «добровольной системы управления», известной как «Кибернетический добровольный контроль» (CVC), и «роботизированной автономной системы управления», известной как Cybernic Autonomous Control (CAC) для автоматической поддержки движения. [11] [12] [13]
Пользователи [ править ]
HAL разработан, чтобы помогать инвалидам и пожилым людям в их повседневных задачах, но также может использоваться для поддержки рабочих, выполняющих тяжелые физически работы, такие как спасательные работы при стихийных бедствиях или строительство. HAL в основном используется пациентами с ограниченными возможностями в больницах и может быть модифицирован, чтобы пациенты могли использовать его для более долгосрочной реабилитации. Кроме того, научные исследования показали, что в сочетании со специально созданными терапевтическими играми экзоскелеты с электроприводом, такие как HAL-5, могут стимулировать познавательную деятельность и помогать детям-инвалидам ходить во время игры. [14] [15] Дальнейшие научные исследования показали, что HAL-терапия может быть эффективно использована для реабилитации после травмы спинного мозга или инсульта . [16]
Во время выставки Consumer Electronics Show 2011 было объявлено, что правительство США выразило заинтересованность в приобретении костюмов HAL. [17] В марте 2011 года Cyberdyne представила HAL-версию только для ног для инвалидов, медицинских работников и заводских рабочих. [18] В ноябре 2011 года HAL был выбран для использования для очистных работ на месте ядерной аварии на Фукусиме . [19] Во время выставки Japan Robot Week в Токио в октябре 2012 года была представлена обновленная версия HAL, разработанная специально для очистки Фукусимы. [7] В марте 2013 года десять японских больниц провели клинические испытания новой системы HAL только для ног. [20]В конце 2014 года экзоскелеты HAL, модифицированные для использования в строительстве, поступили на вооружение японского строительного подрядчика Obayashi Corporation . [6]
См. Также [ править ]
- Атлас (робот) , робот-гуманоид, предназначенный для поиска и спасения
- Эксо Бионикс
- ReWalk
- Экзоскелет Вандербильта
Ссылки [ править ]
- ^ "Костюм робота дает проблеск надежды парализованным" . Времена Мальты . 11 марта 2011 . Проверено 26 августа 2012 года .
- ^ a b «Роботы спешат на помощь, поскольку стареющая Япония ищет помощи» . Австралийский . 13 октября 2012 . Проверено 17 октября 2012 года .
- ^ a b «Японский костюм робота получил глобальный сертификат безопасности» . AFP через Google. 27 февраля 2013 . Проверено 28 февраля 2013 года .
- ^ a b «TÜV Rheinland выдает сертификат ЕС для медицинского робота Cyberdyne HAL®» . TÜV Rheinland. 7 августа 2013 . Проверено 14 августа 2013 года .
- ^ a b «Глобальные компании из Японии» . Еженедельник Toyo Keizai. 14 сентября 2013 . Проверено 17 марта 2014 года .
- ^ a b «Умные ходунки открывают дорогу японским роботам для ухода за престарелыми» . ITWorld.com. 16 октября 2014 . Проверено 22 октября 2014 года .
- ^ a b «Новый экзоскелет HAL: управляемый мозгом костюм для всего тела, который будет использоваться при очистке Фукусимы» . Neurogadget.com. 18 октября 2012 . Проверено 22 октября 2012 года .
- ^ "Силовой костюм Cyberdyne" . YouTube . 31 июля 2009 . Проверено 26 августа 2012 года .
- ^ «HAL, друг для людей с ограниченными возможностями» . Ниппония . Интернет Япония. 15 сентября 2006 . Проверено 16 июля 2013 года .
- ^ «Разработка, производство и обслуживание носимых экзоскелетных устройств нижних конечностей для реабилитации и физической подготовки» (PDF) . Лаборатории андеррайтеров. 11 декабря 2012 . Проверено 16 июля 2013 года .
- ^ Сузуки, Кента; Мито, Годжи; Кавамото, Хироаки; Хасегава, Ясухиса; Санкай, Ёсиюки (январь 2007 г.). «Преднамеренная поддержка ходьбы для пациентов с параплегией с роботизированным костюмом HAL» . Продвинутая робототехника . 21 (12): 1441–1469. DOI : 10.1163 / 156855307781746061 . S2CID 16791965 .
- ^ Кавамото, Хироаки; Камибаяси, Киётака; Наката, Йошио; Ямаваки, Канако; Ариясу, Рёхей; Санкай, Ёсиюки; Сакане, Масатака; Эгути, Киёси; Очиай, Наоюки (2013). «Экспериментальное исследование улучшения передвижения с использованием гибридной вспомогательной конечности у пациентов с хроническим инсультом» . BMC Neurology . 13 : 141. DOI : 10,1186 / 1471-2377-13-141 . PMC 3851710 . PMID 24099524 .
- ^ "Исследовательская программа Cybernics University of Tsukuba" . Глобальная программа COE, Cybernics . Университет Цукуба. 1 апреля 2007 года Архивировано из оригинала 27 октября 2014 года . Проверено 17 марта 2014 года .
- ^ Компьютеры для развития детей-инвалидов - Введение в специальную тематическую сессию . ACM.org. 2002. ISBN 9783540439042. Проверено 26 ноября 2012 года .
- ^ «Влияние футбольного матча виртуальной реальности на ходьбу в роботизированной тренировке походки для детей» . AbleData.com. Апрель 2010. Архивировано 18 октября 2013 года . Проверено 26 ноября 2012 года .CS1 maint: неподходящий URL ( ссылка )
- ^ «Текущие научные исследования экзоскелетной терапии с гибридной вспомогательной конечностью» . ПРОГУЛКА СНОВА Центр . Проверено 28 января 2016 .
- ^ "В центре внимания выставки CES: японские экзоскелеты роботов" . 12 января 2011 года Архивировано из оригинала 23 января 2013 года . Проверено 28 февраля 2013 года .
- ^ "Cyberdyne демонстрирует экзоскелет HAL нижней части тела для помощи инвалидам, а не уничтожения человечества (видео)" . 15 марта 2011 . Проверено 28 февраля 2013 года .
- ^ «Роботизированные экзоскелеты от Cyberdyne могут помочь рабочим очистить ядерный беспорядок на Фукусиме» . Scientific American . 9 ноября 2011 . Проверено 27 ноября 2011 года .
- ^ «Больницы, чтобы проверить костюм робота, чтобы помочь пациентам ходить» . Асахи Симбун . 9 февраля 2013 г. Архивировано из оригинала 13 февраля 2013 года . Проверено 17 февраля 2013 года .
Внешние ссылки [ править ]
- Официальный сайт (на английском и японском языках)
- «Восстание телесных ботов» . IEEE Spectrum . Октябрь 2005. Архивировано из оригинала 4 мая 2009 года . Проверено 18 февраля 2013 года .
- Центр WALK AGAIN - Учебный центр HAL