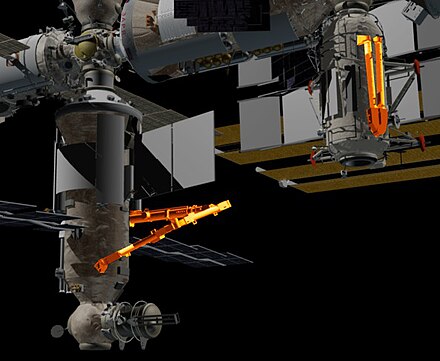
Европейские Роботизированная рука показана на левый прилагаются к Науке , запасной локтевой сустав с 2 конечностей показан справа, прикрепленная к Рассвету
Европейский Robotic Arm ( ERA ) является роботизированной рукой , чтобы быть присоединен к Российскому сегменту на Международной космической станции . Это будет первый манипулятор, способный работать на сегментах российской космической станции, и он дополнит два российских грузовых крана « Стрела» , которые уже установлены на модуле « Пирс ». ERA спроектирован и собран компанией Airbus Defense and Space Netherlands (ранее Dutch Space).
У ERA есть несколько интересных особенностей. Наиболее заметными из них являются его способность `` обходить '' внешние части российских сегментов станции под собственным контролем, передвигаясь вручную между заранее заданными базовыми точками, а также способность выполнять многие задачи автоматически или полуавтоматически, тем самым освобождение операторов для выполнения другой работы. Конкретные задачи ERA включают:
На Международной космической станции уже есть три роботизированных манипулятора, первым из которых является Canadarm2 , но из-за того, что российские грейферы отличаются, эта рука и Dextre могут использоваться только на модуле «Заря» российского сегмента. [1] Третья рука фиксируется на японском экспериментальный модуль , то система дистанционного манипулятора (JEM-RMS) использует аналогичную грейфер приспособление к Канадарм2. Поскольку все российские и европейские космические корабли стыковываются автоматически, нет необходимости манипулировать космическими кораблями на российском сегменте, поэтому европейский рукав вдвое короче и менее мощный, чем Canadarm2.
Робот-манипулятор, разработанный для Европейского космического агентства (ESA) рядом европейских космических компаний с участием голландского космического агентства в качестве генерального подрядчика и субподрядчиков в 8 странах, будет запущен с помощью ракеты Протон вместе с Nauka в 2021 году. для работы в космосе экипажем МКС. В 2010 году в упреждающем порядке был запущен запасной локтевой сустав для руки, прикрепленный к мини-исследовательскому модулю 1 (МИМ-1). MLM будет также служить базой для ERA; Первоначально рука собиралась присоединить к отмененной платформе Science Power Platform, которая имела бы восемь солнечных батарей. [2]
Астронавты могут управлять роботом как изнутри, так и снаружи космической станции. Для управления изнутри космической станции (интерфейс внутриавтомобильной деятельности - человек-машина (IVA-MMI)) используется портативный компьютер , на котором показана модель ERA и ее окружение. Для управления извне космической станции (интерфейс Extra Vehicle Activity-Man Machine (EVA-MMI)) используется специально разработанный интерфейс, который можно использовать в скафандре .
Canadarm , который использовался на космическом шаттле
Система мобильного обслуживания (MSS), также известная как ее основной компонент Canadarm2, используется на МКС.
Система удаленного манипулятора, используемая на модуле МКС Кибо.
Dextre , также известный как ловкий манипулятор специального назначения (SPDM), используемый на МКС
Стрела , кран, используемый на МКС для выполнения задач, аналогичных мобильной сервисной системе.
Ссылки [ править ]
^ "STS 134: Последний полет стремления" (PDF) . НАСА . Дата обращения 2 апреля 2019 .
↑ Зак, Анатолий. «Наука НЭП и силовая платформа МКС» . www.russianspaceweb.com . Дата обращения 2 апреля 2019 .
^ "Европейская роботизированная рука прибывает на Байконур" . Twitter . Проверено 3 июня 2020 .
^ "Россия откладывает запуск исследовательского модуля" Наука "на орбитальную заставу до 2021 года" . ТАСС. 2 апреля 2020 . Дата обращения 2 апреля 2020 .
^ a b c Х. Дж. Кройссен; М. Элленбрук; М. Хендерсон; Х. Петерсен; П. Верзейден и М. Виссер (май 2014 г.). "42-й симпозиум по аэрокосмическому механизму: европейский роботизированный манипулятор: высокоэффективный механизм, наконец, на пути в космос" (PDF) . НАСА . С. 319–333 . Проверено 22 октября 2014 года .
Внешние ссылки [ править ]
Викискладе есть медиафайлы по теме европейской роботизированной руки .
Европейский роботизированный манипулятор - описание и технические характеристики манипулятора ЕКА с июля 2004 г.
ERA - Описание с фотографиями из Dutch Space
vтеКомпоненты Международной космической станции
Орбита
Основные компоненты
Заря ( Функциональный грузовой блок )
Звезда (Сервисный модуль)
Судьба (лаборатория)
Колумб (лаборатория)
Кибо (PM, ELM-PS, EF)
Единство (узел 1)
Гармония (узел 2)
Спокойствие (Узел 3)
Квест Совместный шлюз
Пирс (стыковочный модуль, шлюз)
Рассвет (МРМ 1)
Поиск (MRM 2)
Леонардо (PMM)
Купол
Интегрированная ферменная конструкция (ИТС)
Расширяемый модуль деятельности Bigelow (BEAM)
Подсистемы
Система мобильного обслуживания (MSS)
Canadarm2
Dextre (SPDM)
Сборка стрелы
Краны Стрела
Кибо Система дистанционного Манипулятор
Внешние складские платформы (ВЭЦН)
Экспресс-логистические перевозчики (ELC) 1-4
Ответные переходники под давлением (PMA)
Международные стыковочные адаптеры (IDA)
Электрическая система
Система жизнеобеспечения
Епископ (модуль шлюза)
Window Observational Research Facility (WORF)
Экспериментальные устройства
AMS-02
КАЛЕТ
КОШКИ
GEDI
HDEV
МАКСИ
НИЦЕР
ПК-3 Плюс
МУДРЕЦ III
Будущее
Планируется
Аксиомный орбитальный сегмент
Европейский роботизированный манипулятор (ERA)
Наука (Универсальный лабораторный модуль)
Причал (Узловой модуль)
Модуль научной мощности (NEM-1)
Предложил
Узел 4
XBASE
Независимость-1
Запасное оборудование
Многоцелевые логистические модули (MPLM)
Кибо (ELM-ES)
Экспресс логистический перевозчик (ELC) 5
Модуль временного управления (ICM)
Отменено
Движительный модуль
Модуль размещения центрифуги (CAM)
Модуль жилья
Автомобиль для возврата экипажа (CRV / ACRV)
Платформа Science Power (SPP)
Универсальный док-модуль (UDM)
Российский исследовательский модуль (РМ)
Категория
vтеЕвропейское космическое агентство
Космодромы
Космический центр Гвианы
Esrange
Ракеты-носители
Ариана 5
Ариана 6
Союз
Вега
Удобства
Центр космических операций
Центр космических исследований и технологий
Центр наблюдения Земли ЕКА
Европейский центр астронавтов
Центр космической астрономии
Центр космических приложений и телекоммуникаций
Средство параллельного проектирования
Европейский координационный центр космического телескопа
Связь
ESTRACK
Европейская система передачи данных
Программ
Артемида
ESM
Аврора
Квадроцикл
Коперник
Часовой
Колумбус
КриоСат
EGNOS
ГАЛИЛЕО
ELIPS
ЭкзоМарс
ФЛПП
Программа "Живая планета"
Программа осведомленности о космической обстановке
Научная программа
Горизонт 2000
Космическое видение
Гордость
Предшественники
Европейская организация разработки пусковых установок
Европейская организация космических исследований
похожие темы
Arianespace
ESA Television
ЕВМЕТСАТ
Европейский космический лагерь
GEWEX
Архив планетарной науки
Проекты и миссии
Наука
Солнечная физика
ISEE-2 (1977–87)
Улисс (1990–2009)
SOHO (1995 – настоящее время)
Группа II (2000 – настоящее время)
Solar Orbiter (с 2020 г. по настоящее время)
Лагранж (2020-е)
Планетарная наука
Джотто (1985–92)
Гюйгенс (1997–2005)
СМАРТ-1 (2003–06)
Марс Экспресс (2003 – настоящее время)
Rosetta / Philae (2004–16)
Venus Express (2005–14)
ExoMars Trace Gas Orbiter (2016 – настоящее время)
BepiColombo (2018 – настоящее время)
Ровер Розалинда Франклин (2022 г.)
Исследователь ледяных лун Юпитера (2022)
Комета-перехватчик (2029)
Астрономия и космология
Cos-B (1975–82)
IUE (1978–96)
EXOSAT (1983–86)
Hipparcos (1989–93)
Хаббл (1990-настоящее время)
Эврика (1992–93)
ISO (1995–98)
XMM-Newton (1999 – настоящее время)
ИНТЕГРАЛ (2002 – настоящее время)
CoRoT (2006–13)
Планк (2009-13)
Гершель (2009–13)
Гайя (2013 – настоящее время)
CHEOPS (2019 – настоящее время)
Джеймс Уэбб (2021)
Евклид (2022)
ПЛАТОН (2026 г.)
АРИЭЛЬ (2029 г.)
АФИНА (2031 г.)
LISA (2034)
Наблюдение Земли
Коперник (1988–)
Метеосат первого поколения (1977–97)
ERS-1 (1991–2000)
ERS-2 (1995–2011)
Метеосат второго поколения (2002-настоящее время)
Envisat (2002–12)
Двойная звезда (2003–07)
MetOp (2006 – настоящее время)
GOCE (2009-13)
SMOS (2009 – настоящее время)
CryoSat-2 (2010 – настоящее время)
Swarm (2013 – настоящее время)
Sentinel-1 / 1A / 1B (2014 – настоящее время)
Sentinel-2 / 2A / 2B (2015 – настоящее время)
Sentinel-3 / 3A / 3B (2016 – настоящее время)
Sentinel-5 Precursor (2017 – настоящее время)
ADM-Aeolus (2018 – настоящее время)
Биомасса (2022)
EarthCARE (2022)
МетОп-СГ-А (2022 г.)
Метеосат третьего поколения ( Sentinel-4 ) (2023 г.)
МетОп-СГ-Б (2023 г.)
УЛЫБКА (2023)
FLEX (2024 год)
ФОРУМ (2026)
Космический полет МКС
Вклад МКС (с 1998 г. по настоящее время)
Колумбус (2008 – настоящее время)
Жюль Верн (2008)
Купол (2010 – настоящее время)
Иоганн Кеплер (2011)
Эдоардо Амальди (2012)
Альберт Эйнштейн (2013)
Жорж Лемэтр (2014)
Европейский роботизированный манипулятор (2020)
Телекоммуникации
GEOS 2 (1978)
Олимп-1 (1989–93)
Артемида (2001-настоящее время)
GIOVE-A (2005 – настоящее время)
GIOVE-B (2008 – настоящее время)
HYLAS-1 (2010 – настоящее время)
Галилео ИОВ (2011 – настоящее время)
Galileo FOC (2014 – настоящее время)
EGNOS
Европейская система передачи данных (с 2016 г. по настоящее время)
Демонстраторы технологий
ARD (1998)
ПРОБА-1 (2001 – настоящее время)
ДА2 (2007)
ПРОБА-2 (2009 – настоящее время)
ПРОБА-В (2013 – настоящее время)
IXV (2015)
LISA Pathfinder (2015-17)
OPS-SAT (2019 – настоящее время)
ПРОБА-3 (2022 г.)
АИДА (2023 г.)
Отменено и предложено
АЛЬТИУС
Ariane 5 ME
Бесплатный флаер с обслуживанием человека в Колумбусе


{kind=link}
{kind=link}
{kind=link}