Эта статья требует дополнительных ссылок для проверки . ( февраль 2009 г. ) ( Узнайте, как и когда удалить этот шаблон сообщения ) |
Полуактивная радиолокационная система самонаведения ( SARH ) является распространенным типом системы наведения ракет , возможно, наиболее распространенным типом для ракетных систем большой дальности « воздух-воздух» и « земля-воздух» . Название относится к тому факту , что сама ракета является лишь пассивным детектором сигнала радара - обеспечивается внешним ( «внешн») источника , как это отражается от мишени [1] [2] (в отличие от активной радиолокационной ГСН , в котором используется активный радар: трансивер ). В полуактивных ракетных комплексах используется бистатическая РЛС непрерывного действия .
Краткий код НАТО для пуска полуактивной радиолокационной ракеты самонаведения - Fox One .
Концепция [ править ]
{kind=link}
Основная концепция SARH заключается в том, что, поскольку почти все системы обнаружения и слежения состоят из радиолокационной системы, дублирование этого оборудования на самой ракете является избыточным. Вес передатчика уменьшает дальность действия любого летающего объекта, поэтому пассивные системы имеют больший радиус действия. Кроме того, разрешениеРабота радара сильно зависит от физического размера антенны, а в маленьком носовом конусе ракеты недостаточно места для обеспечения точности, необходимой для наведения. Вместо этого большая радиолокационная тарелка на земле или на стартовом самолете будет обеспечивать необходимый сигнал и логику слежения, а ракета просто должна слушать сигнал, отраженный от цели, и указывать себя в правильном направлении. Кроме того, ракета будет прослушивать в обратном направлении сигнал, передаваемый с пусковой платформы, в качестве ориентира, что позволяет ей избегать некоторых видов отвлекающих помех от радара, создаваемых целью.
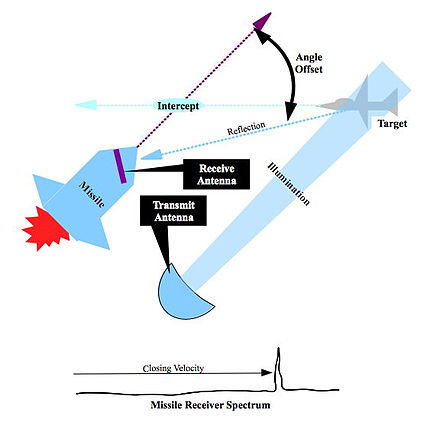
Система SARH определяет скорость сближения, используя геометрию траектории полета, показанную на рисунке 1. Скорость сближения используется для установки местоположения частоты для принимаемого CW-сигнала, показанного в нижней части диаграммы (спектр). Угол смещения антенны ракетной антенны устанавливается после захвата цели ГСН с использованием спектрального местоположения, установленного с использованием скорости сближения. Антенна ГСН - моноимпульсная РЛС.приемник, который производит измерения угловой ошибки с использованием этого фиксированного положения. Траектория полета контролируется путем ввода навигационных данных в систему рулевого управления (хвостовое оперение или ракета на подвесе) с использованием угловых ошибок, создаваемых антенной. Это заставляет корпус ракеты удерживать цель вблизи центральной линии антенны, в то время как антенна удерживается в фиксированном положении. Геометрия угла смещения определяется динамикой полета с использованием скорости ракеты, скорости цели и расстояния разноса. [3]
Методы почти идентичны: использование сигналов помех , видео оптического наведения и инфракрасного излучения для самонаведения.
Максимальная дальность увеличена в системах SARH с использованием навигационных данных в самонаводящемся транспортном средстве для увеличения расстояния до того, как потребуется слежение за антенной для наведения на терминал. Навигация полагается на данные об ускорении , гироскопические данные и данные глобального позиционирования . Это увеличивает расстояние за счет минимизации корректирующих маневров, которые тратят впустую энергию полета.
Сравните это с системами управления лучом , такими как RIM-8 Talos , в которых радар направлен на цель, а ракета удерживается в центре луча, слушая сигнал в задней части корпуса ракеты. В системе SARH ракета слушает отраженный сигнал в носовой части и по-прежнему отвечает за обеспечение своего рода «ведущего» наведения. Недостатки бревнадвоякие: во-первых, радиолокационный сигнал имеет «веерообразную» форму, увеличивается с увеличением расстояния и, следовательно, менее точен. Это означает, что система управления лучом не точна на больших расстояниях, в то время как SARH в значительной степени не зависит от дальности и становится более точной по мере приближения к цели или к источнику отраженного сигнала, который он прослушивает. Пониженная точность означает, что ракета должна использовать очень большую боеголовку, чтобы быть эффективной (т.е. ядерной). Другое требование состоит в том, что система управления лучом должна точно отслеживать цель на высоких скоростях, для чего обычно требуется один радар для отслеживания и другой «более узкий» луч для наведения.
Системе SARH требуется только один радар, настроенный на более широкую диаграмму направленности.
Радар непрерывного действия [ править ]
Современные системы SARH используют для наведения радар непрерывного действия (CW radar). Несмотря на то, что большинство современных радаров для истребителей представляют собой импульсные доплеровские установки, большинство из них имеют функцию непрерывного управления для наведения радарных ракет. Некоторые советские самолеты, такие как некоторые версии МиГ-23 и МиГ-27 , использовали вспомогательную капсулу наведения или антенну для передачи сигнала CW. Зенитная ракета « Вымпел» Р-33 для перехватчика МиГ-31 использует SARH в качестве основного типа наведения (с дополнением инерционного наведения на начальном этапе).
Ракеты Sarh требуют отслеживания радаром , чтобы получить цель, и более узконаправленные прожектора РЛС «засветиться» мишени для того , чтобы ракеты к замку на к возвращению радара , отраженный от цели. [4] Цель должна оставаться освещенной в течение всего полета ракеты. Это может сделать пусковой самолет уязвимым для контратаки, а также даст электронным системам предупреждения цели время для обнаружения атаки и принятия контрмер. Поскольку большинству ракет SARH требуется наведение в течение всего полета, старые радары ограничены одной целью на излучатель радара за раз.
Максимальный радиус действия системы SARH определяется плотностью энергии передатчика. Увеличение мощности передачи может увеличить плотность энергии. Уменьшение ширины полосы шума передатчика также может увеличить плотность энергии. Спектральная плотность, согласованная с шириной полосы обнаружения приемного радара, является ограничивающим фактором для максимальной дальности.
Искатель обратного моноимпульса [ править ]
Электронное противодействие (ECCM) [ править ]
Оружие SARH последнего поколения обладает превосходными возможностями электронного противодействия ( ECCM ), но система все еще имеет фундаментальные ограничения. Некоторые более новые ракеты, такие как SM-2 , содержат оконечное полуактивное радиолокационное наведение (ЦАРХ). Ракеты TSARH используют инерционное наведение на большей части своего полета, активируя свою систему SARH только для последней атаки. Это может помешать цели понять, что она находится под атакой, до незадолго до удара ракеты. Поскольку ракете требуется наведение только на конечной фазе, каждый радиолокационный излучатель можно использовать для поражения большего количества целей. Некоторые из этих вооружений, например SM-2, позволяют пусковой платформе обновлять ракету с промежуточными обновлениями через канал передачи данных .
Некоторые из наиболее эффективных методов, используемых для поражения полуактивной РЛС самонаведения, - это летные методы. Это зависит от того, знает ли пилот, что ракета запущена. Система глобального позиционирования позволяет ракете достичь прогнозируемого перехвата без передачи данных, что значительно увеличивает летальность за счет откладывания освещения на большую часть полета ракеты. Пилот не знает, что произошел запуск, поэтому техника полета становится практически неактуальной. Одной из трудностей является тестирование, потому что эта функция создает риски для общественной безопасности, если неисправность предотвращает сигналы самоуничтожения линии передачи данных, когда ракета движется в неправильном направлении. Большинство береговых линий густо заселены, поэтому этот риск существует в испытательных центрах для морских систем, которые находятся недалеко от береговых линий.
- Тихоокеанский ракетный полигон
- Центр авиации ВМС, дивизия вооружений, Пойнт Мугу, Чайна Лейк
- Атлантические испытательные полигоны
Боевой отчет [ править ]
Боевые показатели американских ракет SARH во время войны во Вьетнаме не впечатляли . Истребители ВВС США и ВМС США, вооруженные AIM-7 Sparrow, достигли почти 10% успеха, что, как правило, усиливало эффект удаления орудия на большинстве F-4 Phantom , которые несли 4 Sparrow. [4] В то время как некоторые из отказов были связаны с механическими отказами электроники 1960-х годов, которые могли быть нарушены, если тянуть тележку по неровной дороге, или ошибкой пилота; внутренняя точность этого оружия была низкой по сравнению с Сайдуиндером и пушками [ необходима цитата ] .
Начиная с Desert Storm , большинство боевых побед F-15 Eagle было достигнуто с помощью Sparrow, находящегося за пределами видимости . Аналогичные характеристики были достигнуты у стандартной ракеты морского базирования .
Советские системы, использующие SARH, достигли ряда заметных успехов, в частности, в войне Судного дня , когда тактические ЗРК 2K12 Kub (название НАТО SA-6) смогли эффективно перекрыть воздушное пространство израильским ВВС . 2К12 также сбил американский F-16 в боснийской войне.
Список ракет [ править ]
SARH - это широко используемая современная методика наведения ракет, используемая в нескольких ракетных системах, таких как:
- AIM-4A / E / F Сокол
- AIM-7 Воробей
- AIM-9C Сайдвиндер
- AIM-26 Сокол
- Aspide
- Ракетный комплекс Бук
- MIM-23 HAWK
- R-23
- R-33
- Р-27Р
- РИМ-7 Морской воробей
- RIM-8 Talos
- РИМ-66 Стандарт
- РИМ-162 ЭССМ
- RIM-174 Стандартный ERAM
- С-200
- С-300
- С-400
- SA-6 Gainful
- Skyflash
Ссылки [ править ]
- ^ "Активное и полуактивное наведение радиолокационных ракет" . Air Power Australia.
- ^ "Бистатический радар" . Radartutorial.eu.
- ^ «Глава 15. Руководство и контроль» . Федерация американских ученых.
- ^ a b Карло Копп (июнь 1982 г.). «Активное и полуактивное радиолокационное наведение ракет» . Австралийская авиация.
Внешние ссылки [ править ]
- Активное и полуактивное радиолокационное наведение ракет